Surrey Training, Research and Nanosatellite Demonstration
The STRaND programme is intended to be a long-term arrangement between SSTL and the SSC, with STRaND-1 the first of a long line of STRaND nanosatellites. It builds upon a similar programme, a decade ago, which resulted in the highly successful SNAP-1 nanosatellite mission, launched in 2000.
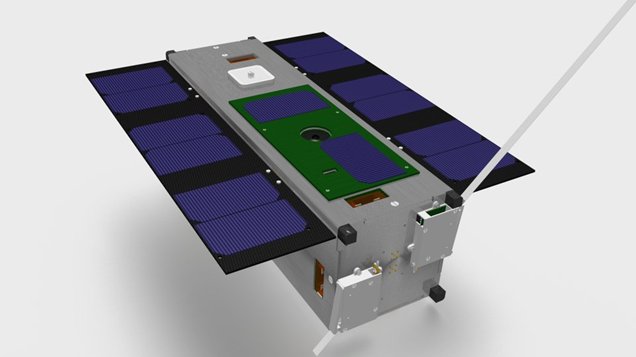

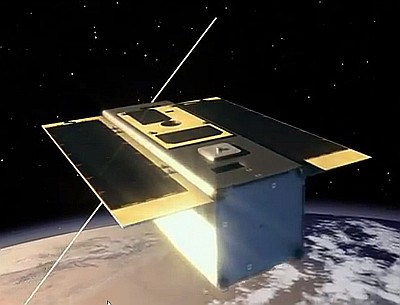
STRaND-1 is using a three Cubesat (3U) module structure to provide a quick and cost-effective framework to test the applications of smartphone technology in space.
Whilst the phone gets all of the media attention, STRaND-1 is packed with a multitude of experimental systems that will allow it to do all sorts of exciting things when in orbit. STRaND-1 will have no less than 4 means of manoeuvring. It is equipped with magnetorquers and reaction wheels as well as some brand new propulsion systems: the WARP DRiVE and 8 Pulsed Plasma Thrusters. The Cubesat will also carry a total of four cameras: two to help orientate the satellite (the sun sensor and nadir sensor seen in the image below), the phone camera that will shoot photos of Earth and a final one (also seen in the image) that will show us what the phone is doing in orbit.
NASA-Catalog: 39090
Downlink
437.568 MHz 9k6 FSK AX.25 (later 19k2)
Call
Status
ACTIVE
31 March 2013 – October 2013 no signals
Orbital Parameter
Inclination 98.607 RA of A. Node 245.807 Eccentricity 0.0005347 Argument of Perigee 261.850 Revs per day 14.33079817 Period 1h 40m 28s (100.47 min) Semi-major axis 7 160 km Perigee x Apogee 778 x 785 km BStar (drag term) 0.000107290 1/ER Mean anomaly 98.178
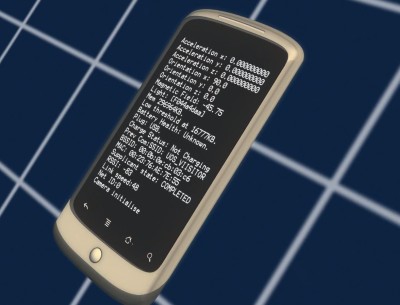
At the heart of STRaND-1 is a Google Nexus One smartphone with an Android operating system. Smartphones contain highly advanced technologies and incorporate several key features that are integral to a satellite – such as cameras, radio links, accelerometers and high performance computer processors – almost everything a spacecraft needs except the solar panels and propulsion.
During the first phase of the mission, STRaND-1 will use a number of experimental ‘Apps’ to collect data whilst a new high-speed linux-based CubeSat computer developed by SSC takes care of the satellite. During phase two, the STRaND-1 team plan to switch the satellite’s in-orbit operations to the smartphone, thereby testing the capabilities of a number of standard smartphone components for a space environment. The satellite will be commissioned and operated from the Surrey Space Centre’s ground station at the University of Surrey.
Being the first smartphone satellite in orbit is just one of many ‘firsts’ that STRaND-1 is hoping to achieve. It will also fly innovative new technologies such as a ‘WARP DRiVE’ (Water Alcohol Resistojet Propulsion Deorbit Re-entry Velocity Experiment) and electric Pulsed Plasma Thrusters (PPTs); both ‘firsts’ to fly on a nanosatellite. It is also flying a 3D printed part – believed to be the first to fly in space!


Telemetry
Hummingbird – The Open Satellite Ground Segment (LINUX)

HBird on facebook
http://www.hbird.de/?q=guide%2Finstallation
At the moment you should see this repetitious set of telemetry frames:
083: 00 C0 80 88 09 02 66 81 05 00 00 58 00 59 084: 00 C0 80 89 09 02 66 86 05 00 03 09 02 04 085: 00 C0 80 8A 09 02 66 8B 05 00 00 59 00 5B 086: 00 C0 80 8B 09 02 66 90 05 00 00 56 00 5A 087: 00 C0 80 8C 09 02 66 95 05 00 00 5B 00 56 088: 00 C0 80 8D 09 02 66 9A 05 00 00 59 00 59 089: 00 C0 80 8E 09 02 66 9F 05 00 00 58 00 57 090: 00 C0 80 8F 09 02 66 A4 05 00 00 57 00 59 091: 00 C0 80 90 09 02 66 A9 05 00 00 00 00 00 092: 00 C0 80 91 09 02 66 AC 05 00 00 00 00 00 093: 00 C0 80 92 0C 02 80 0C 08 BB E3 07 00 00 00 00 00 094: 00 C0 80 93 06 02 2C 03 02 A2 00 095: 00 C0 80 94 06 02 2C 08 02 A7 00 096: 00 C0 80 95 06 02 2D 0D 02 C8 03 097: 00 C0 80 96 06 02 2D 07 02 FF 03 098: 00 C0 80 97 06 02 2D 01 02 C5 00 099: 00 C0 80 98 06 02 2D 04 02 CF 03 100: 00 C0 80 99 06 02 2D 0A 02 FF 03 101: 00 C0 80 9A 06 02 2D 1F 02 94 03 102: 00 C0 80 9B 0C 02 89 03 08 43 A5 00 00 51 C6 00 00 103: 00 C0 80 9C 0C 02 89 05 08 08 86 02 00 BF E3 07 00
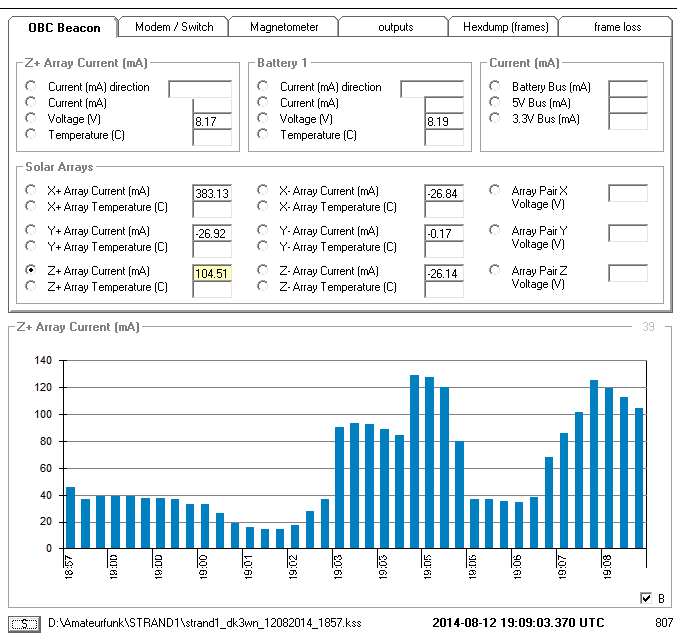
10 frames switch board telemtry (0x66) 1 OBC time frame (UNIX time stamp) 8 OBC telemetry frames (battery voltage, solar array currents) 2 magnetometer telemetry frames (x,y,z)
There is no message beacon at the moment.
IF the text message is sent you can expect the following frames:
014: 00 C0 80 8A 2E C0 53 54 52 61 4E 44 31 20 4D 4F 44 45 4D 20 42 45 41 43 4F 4E 20
2D 20 48 65 6C 70 20 6D 65 20 4F 42 43 20 4B 65 6E 6F 62 69 0D 0A C0 00
015: 00 C0 80 8B 06 01 E0 00 00 07 26
016: 00 01 E1 00 00 00 06
017: 00 01 E3 00 00 00 00
018: 00 01 E2 00 00 19 EC
019: 00 01 E4 00 00 00 00
The ” STRaND1 MODEM BEACON – Help me OBC Kenobi” message followed by 5 modem telemetry frames (&E0 .. &E4) -> packet counters and time since last I2C message Only the first one (&E0) contains the HDLC flag.
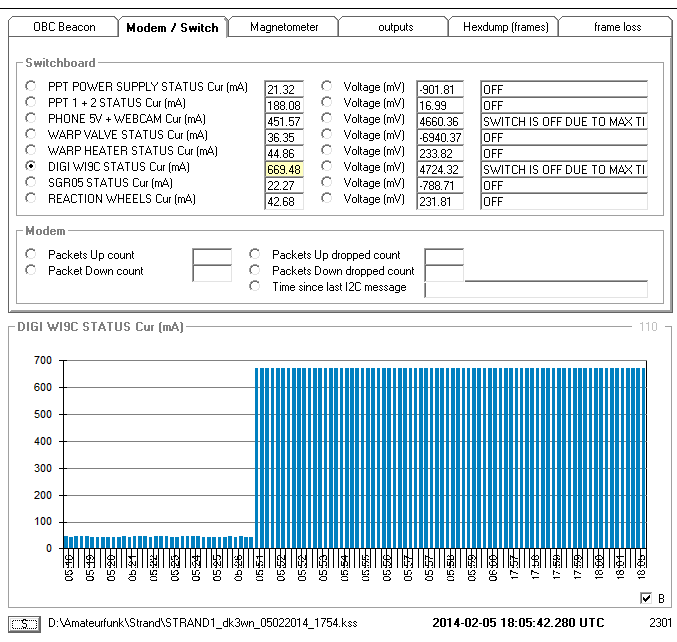
Test of the Embedded High Performance Computer Digi Wi-9C since Feb 5, 2014
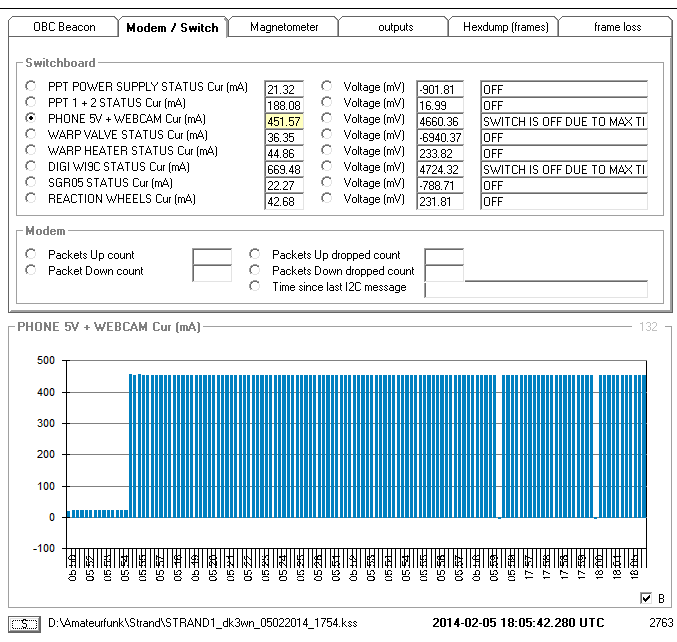
Test of the Google Nexus One Mobile Phone since Feb 5, 2014.
Homepage und weitere Info’s