
POSAT-1 war einer von 6 Satelliten, die zusammen auf einer Ariane V59 von Franz. Guiana am 26.09.1993 um 0147 UTC durch Ariane 4 (Flug 59) als “Huckepack” von STELLA III mit dem ASAP (Ariane Structure for Auxiliary Payloads) Service gestartet. Die anderen Satelliten waren: STELLA, KITSAT-2 (KO-25), HEALTHSAT-2, ITAMSAT (IO-26) und EYESAT (AO-27). PoSAT-1 ist in einem heliosynchronous, quasi-polaren Orbit in einer Höhe von ungefähr 790 Kilometern.
POSAT-1 wurde im Auftrag von Portugal bei der SSTL und basiert auf der bekannten UoSat-Struktur. Nach dem Start stand er für einige Zeit dem Amateurfunk zur Verfügung. Später wurde er jedoch für kommerzielle Zwecke benutzt.
POSAT-1 war 2003 wieder in die Schlagzeilen geraten, als er zu Zeiten des Sonnenfleckenmaximums massive Solarstürme überwachte. Das Cosmic Ray Experiment (CRE) hat die Veränderungen der ionisierenden Strahlung und die Auswirkungen auf Satelliten und Bodenstationen seit seinem Start in 1993 ständig überwacht.
Zu dieser Zeit war die Aktivität der Sonne sehr hoch, es gab viele große Sonnenflecken und massive Solarstürme. Diese sind auch als koronale Massenausbrüche bekannt (CME), wobei viele Partikel (Protone und andere Ionen) in Raum ausgestoßen werden. Bis diese Partikel die Erde erreichen, füllt die ionisierende Strahlungs vorübergehend die äußere Magnetosphäre. Solche Fälle sind bekannt als Solarpartikelfälle (SPEs). Die Satelliten auf geostationären Bahnen (36.000 Kilometer Höhe) werden natürlich zuerst beeinflußt. Die Partikel folgen zudem den magnetischen Linien in Richtung zu den polaren Regionen der Erde, in denen sie wiederum LEO-Satelliten (700-1200 km) beeinflussen können.
Die kommerzielle Nutzung von PoSAT-1 wurde bestand bis vor einigen Jahren aus der Übertragung von Verkehr für die portugiesischen militärischen Truppen (SFOR/IFOR Truppen), die in Angola, im Bosnien und in Mosambik stationiert waren. Mit den PoSAT-1 Kameras wurden dabei Fotos von Wetterzyklen und Landmassen weltweit gemacht.

VITA (Volunteers in Technical Assistance) verwendete PoSAT-1, als Ersatz für UoSat-3. Seit 1990 hatte VITA 24 Bodenstationen in 14 Ländern (u.a. Tansania, Irland, Antarktik) mit UoSat-3 für Gesundheit, Ausbildung, Unfall, Flüchtlingregelung, Kindentwicklung und administrative Kommunikationen verbunden. Er zeigte seinen einzigartigen Nutzen vor allem während der Ebola Krise in Zaire (Kongo) als er das Hauptkommunikationsmittel in der betroffenen Region war.
Orbital Parameter
Name POSAT-1 NORAD # 22829 COSPAR Bezeichnung 1993-061-G Inklination (Grad) 98.237 RAAN 171.252 Excentrizität 0.0009005 ARGP 217.371 Umläufe pro Tag 14.30049741 Periode 1h 40m 41s (100.68 Min) Semi-major axis 7 170 km Perigäum x Apogäum 785 x 798 km Bstar (drag Faktor) 0.000047372 1/ER Mean Anomaly 142.684
Uplink
145.925 MHz
145.975 MHz
Downlink
435.075 MHz (FM, FSK 9k6 AX.25)
435.275 MHz (FM, FSK 9k6 AX.25)
429.95 MHz
Calls
Broadcast: POSAT1-11
BBS: POSAT1-12
Status
aktiv – allerdings nicht für Amateurfunk – auf 429.950 MHz starkes 9k6 FSK Signal
August 2005:
AMSAT-UK-Sekretär Jim Heck, G3WGM, gab am AMSAT-UK International Space Colloquium in Guildford, England, bekannt, dass PoSAT-1 (PO-28) in den kommenden Wochen wieder in den Amateurfunk-Satellitendienst zurückkehrt. Aller Voraussicht nach, wird er wieder als 9k6 Store&Forward BBS arbeiten. Vielleicht kann man dann auch wieder in den Genuss der ausgezeichneten Aufnahmen des Kameraexperimentes (EIS) kommen…
ctrl: 3 {UI} PID: BB {UNKNOWN} Total Frame Bytes: 53
from POSAT1-11 to QST-1 :
1 > 02 BE E5 01 00 CA F4 00 00 00 00 00 00 00 00 00 00 00 00 00
21 > 00 00 00 93 64 00 00 01 00 00 00 00 00 00 00 B5 DF
........................d............
--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 30
from POSAT1-11 to STATUS :
1 > 42 3A 20 31 32 32 38 36 38 33 37 34 34 0D
B: 1228683744
--------------------------------------------------------------------
ctrl: 3 {UI} PID: BB {UNKNOWN} Total Frame Bytes: 26
from POSAT1-11 to POCTRM :
1 > 4F 4B 20 50 4F 43 54 52 4D 0D
OK POCTRM
--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 29
from POSAT1-11 to PBLIST :
1 > 50 42 3A 20 50 4F 43 54 52 4D 5C 44 0D
PB: POCTRM\D
--------------------------------------------------------------------
ctrl: 3 {UI} PID: BB {UNKNOWN} Total Frame Bytes: 26
from POSAT1-11 to POCTRM :
1 > 4F 4B 20 50 4F 43 54 52 4D 0D
OK POCTRM
--------------------------------------------------------------------
ctrl: 3 {UI} PID: BB {UNKNOWN} Total Frame Bytes: -1
from POSAT1-11 to POCTRM :
9k6 AX.25 Frames vom 17.08.2005, 0515UTC
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 30
from POSAT1-11 to STATUS :
1 > 42 3A 20 31 32 32 39 33 33 38 34 32 33 0D
B: 1229338423--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 27
from POSAT1-11 to PBLIST :
1 > 50 42 3A 20 45 6D 70 74 79 2E 0D
PB: Empty.--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 27
from POSAT1-11 to PBLIST :
1 > 50 42 3A 20 45 6D 70 74 79 2E 0D
PB: Empty.--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 101
from P/S.T1 to QST :
1 > 4F 41 4B 20 45 3A 31 20 4D 3A 30 20 43 3A 31 20 52 3A 31 39
21 > 36 20 50 3A 2D 39 31 20 59 3A 2D 37 31 31 36 20 59 52 3A 35
41 > 39 32 20 CF 59 22 2E 34 37 36 20 4F 59 3A 36 33 38 20 4F 5A
61 > 3A 2D 31 30 37 B2 21 4C 5B 3A 30 20 54 59 3A 2D 31 20 54 5A
81 > 3A 31 0A 8D 14
OAK E:1 M:0 C:1 R:196 P:-91 Y:-7116 YR:592 .Y".476 OY:638 OZ:-107.!L[:0 TY:-1 TZ:1
..
--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 27
from POSAT1-11 to PBLIST :
1 > 50 42 3A 20 45 6D 70 74 79 2E 0D
PB: Empty.--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 27
from POSAT1-11 to PBLIST :
1 > 50 42 3A 20 45 6D 70 74 79 2E 0D
PB: Empty.--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 27
from POSAT1-11 to PBLIST :
1 > 50 42 3A 20 45 6D 70 74 79 2E 0D
PB: Empty.--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 27
from POSAT1-11 to PBLIST :
1 > 50 42 3A 20 45 6D 70 74 79 2E 0D
PB: Empty.--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 27
from POSAT1-11 to PBLIST :
1 > 50 42 3A 20 45 6D 70 74 79 2E 0D
PB: Empty.--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 27
from POSAT1-11 to PBLIST :
1 > 50 42 3A 20 45 6D 70 74 79 2E 0D
PB: Empty.--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 30
from POSAT1-11 to STATUS :
1 > 42 3A 20 31 32 32 39 33 33 38 34 32 33 0D
B: 1229338423--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 27
from POSAT1-12 to BBSTAT :
1 > 4F 70 65 6E 20 31 32 61 20 3A 20
Open 12a :
--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 27
from POSAT1-11 to PBLIST :
1 > 50 42 3A 20 45 6D 70 74 79 2E 0D
PB: Empty.--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 79
from POSAT1 to SKED :
1 > 53 6B 65 64 20 31 2E 35 20 46 69 6C 65 31 3A 31 65 34 65 66
21 > 20 46 69 6C 65 32 3A 31 65 34 65 65 20 4E 65 78 74 3A 57 65
41 > 64 20 41 75 67 20 31 37 20 31 38 3A 30 30 3A 30 30 20 32 30
61 > 30 35 0A
Sked 1.5 File1:1e4ef File2:1e4ee Next:Wed Aug 17 18:00:00 2005
--------------------------------------------------------------------
ctrl: 3 {UI} PID: F0 {No L3} Total Frame Bytes: 27
from POSAT1-11 to PBLIST :
1 > 50 42 3A 20 45 6D 70 74 79 2E 0D
PB: Empty.
9k6 AX.25 Frames vom 17.08.2005, 1500UTC

Systembeschreibung
Struktur
PoSATs modulare Struktur besteht aus 11 gestapelten Aluminiumbehältern, welche die Elektronik der unterschiedlichen Untersysteme enthalten. Der erste Behälter an der Unterseite des Satelliten enthält die Batterien und die Kameras. Gefolgt wird dieser von zwei Behältern mit dem Hf-System. Die folgenden Behälter beinhalten die Power Unit und das Verteilungermodul, die Fernsteuer- und Telemtrie Unit, das Primär-OBC, das Stern-Sensor-Modul und den GPS Empfänger, das Sekundär-OBC, die Transputer Unit, die DSPE Unit und das ADCS Modul. Auf die Oberseite sind die ADCS Sensoren und der Boom angebracht. Die Solarzellen sind an den vier Seiten angebracht. Der Satellit ist ein Quader mit den Abmessungen 35×35×58 cm und hat eine Gesamtmasse von etwa 50 kg.
Power System
Vier Solarpanel, jedes enthält 1344 GaAs Zellen, lefert die Energie für alle an Bord befindlichen Systeme. Um eine ununterbrochene und kontrollierte Energieversorgung im Low Orbit (LEO) zu gewährleisten, werden 10 NiCd Batterien durch die Solarzellen geladen, während das Energieüberwachungsmodul die Verteilung der Leistung (18W) kontolliert.
Onbord Computersystem (OBC) Die OBC Unit führt die ganze Verarbeitung durch, die auf Kommunikationen, Telecommanding und Telemetrie, Housekeeping bezogen ist und steuert auch die Nutzlasten. Der Hauptmikroprozessor ist ein INTEL-80C186, 8MHz mit 512kByte RAM und und einem PROM für das Laden des Betriebssystems. Für die Systemschnittstellen steht eine 16Mb RAMDISK zur Verfügung. Für die Redundanz ist ein zweites OBC Modul integriert worden, basierend auf einem INTEL-80C188, 8MHz mit 512kByte RAM.
Store&Forward Communication
Das Kommunikationssystem von PoSAT-1 besteht aus HF-System, Antennen (ein VHF Monopole für Empfang und 4 UHF Monopoles für Senden), Empfänger und Sender (2 und 10 Watt), Modems (9k6 FSK und 1k2 AFSK) die ein Interface zum Telecommand & Telemetrie Modul, zum S&F Communications System und zur digitalen Signalaufbereitungunit (DSPE) haben.
Attitude Determination and control
Die Lagestabilisierung wird durch ein externes Magnetometer (das interne Magnetometer wurde nur bis zur Entfaltung des Booms benutzt) und einem Satz Erdhorizont-Sensoren und Sonne-Sensoren durchgeführt. Das passive Stabilisierung basiert auf dem entfalteten Boom und den Magnetorquers (Permanentmagnete) auf jeder Satellitseite.
Thermisches Design und Housekeeping
Das thermische Design von PoSAT-1 basiert auf einem konzentrierten parameterbegrenzten Differenzialmodell. Um eine mittlere Temperatur von 10°C an den Batteriemodulen und einer gleichmäßigen Verteilung der Bestrahlungsstärke der Solarpanelen durch die Sonne zu gewährleisten (und somit die Effizienz zu optimieren) muß eine sehr langsame Drehbeschleunigung um die Z-Achse erreicht werden.
Bodenstation
Die Befehl- und Kontrollstation von PoSAT-1 befindet sich in Sintra (Portugal) im Operational Center of Satellites of the Continent der portugiesischen Firma Radio MARCONI. Die Bodenstation an der Universität von Surrey, UK, dient als Backup-Station. Die Bodenstation an LAER, INETI dienen als Unterstützungsstationen für das User-Segment.
Payload
Earth Image System (EIS)
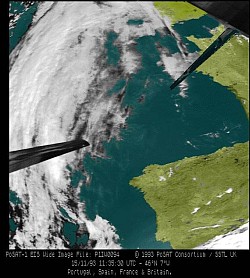
Das Earth Image System enthält, zwei CCD Kameras, die parallel, aber mit unterschiedlichem Betrachtungswinkeln arbeiten. Eine Kamera erfasst einen 1232 × 1267 km Bereiche der Erde bei einer Auflösung von 2.2 Kilometer (Weitwinkelkamera), während die andere Regionen von 123 × 127 km bei 220 m Auflösung erfasst (schmale Winkelkamera). Alle Bilder werden durch die Transputer Unit komprimiert und auf der RAMDISK gespeichert, bevor sie von der Bodenstation heruntergeladen werden. Die Größe der Bilder beträgt 576 × 560 Pixel für die EIS Bilder und 576 × 284 Pixel für die SIS Bilder.
Star Image System (SIS)
das SIS nimmt einen Satz Sternbilder (mit 576 × 284 Pixel und Auflösung 9.7°×7.2°) der Reihe nach auf, ermittelt die Sterne in den Bildern und sucht nach dem beobachteten Sternmuster in einem Sternkatalog. Durch diese Übereinstimmung und dem Vergleich der genauen Position, die das GPS Systemm liefert, kann eine genaue Lagehaltung erreicht werden. Das Stern Sensoren System basiert auf der gleichen Technologie wie das EIS, wurde aber für das schwache Licht von den Sternen optimiert.
Ein interessanter Artikel dazu ist hier zu finden.
GPS Experiment
Das GPS System besteht aus einer GPS Antenne, die am Frontseite des Satelliten angebracht ist und einem Empfänger (Trimble Trans-II). Die Synchronisation mit GPS Satelliten dient zur Gewinnung einer exakten Zeitbasis. Die empfangenen Daten werden durch den Transputer decodiert und gefiltert, um die genaue Position und Geschwindigkeit des Satelliten zu ermitteln. Dies ermöglicht dem Satelliten, seinen eigenen Keplersatz zu erzeugen, die Zeitbasis und Synchronisierung zu anderen Computern zur Verfügung zu stellen.

Cosmic Ray Experiment (CRE)
Das CRE besteht aus einer PIN-Diode und einem Mehrkanal-Analysator, zum Ermitteln der energetischen Partikel. Um ein Spektrum der beobachteten Energie der Partikel innerhalb des Raumfahrzeugs zu ermitteln wird in sieben Zonen des Satelliten gemessen. Somit können Strahlungsdiagramme konstruiert werden, um den Einsatz elektronischer Bauelemente im Orbit zu optimieren (Auswahl, Positionisierungs usw.). Speziellen RADFETs wurden eingesetzt, um die angesammelte ionisierende Dosis zu überwachen. Die größeren Speicherbausteine der Bordcomputern werden regelmäßig ‘gewaschen’, um umgekippte Bits (SEU) zu ermitteln und zu loggen.
Digital Signalaufbereitungexperiment (DSPE)
dieses Experiment basiert auf zwei Texas Instruments Prozessoren der Reihe TMS320 (Signalprozessoren C25 und C30), um neue Modulation/Demodulation Technologien zu testen. Das System ist in der Lage, Audiosignale vom Uplink zu verarbeiten.
Links und weitere Informationen
http://www.dop.ineti.pt/posat/http://unidyne.uni.pt/~fcr/posat/posat1ih.htmlhttp://www.ee.surrey.ac.uk/SSC/CSER/UOSAT/missions/posat1.html